Stavíme roboty

Celý plán kroužku pokročilých programátorů včetně prezentace a pracovních listů je na samostatném webu.




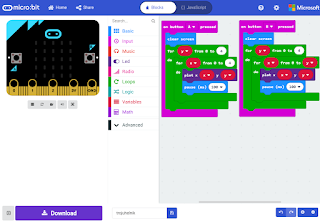
Prozkoumali jsme polohové i rotační servo, připojili k micro:bitu pomocí destičky ring:bit (nebo jiné rozšiřující desky) a ovládali stisknutím tlačítek.


Nachystáme si funkce pro ovládání robota, abychom nemuseli kód upravovat na více místech a program byl přehledný. Program testujeme nejprve použitím tlačítek, teprve po vyzkoušení a odladění přidáme dálkové ovládání.
(4), (5), (6) konstrukce robotů z kartonu, dřívek, brček, ...

Nejprve musíme zjistit, jak detekce náklonu funguje a jak ji využít. Vytvoříme proto dva nové testovací programy naklon-ovladac a naklon-servo.
Cíl: nakláněním obyčejného microbita se pohybuje vrtulka serva připevněného k destičce s druhým microbitem.
(8) Programy ovladač a robot doplníme o plynulé zatáčení
Přidáme i stav ovladače, zda posílá náklon nebo ne.
>>> naše dřívější dálkově ovládaná autíčka
>>> servo projekty s polohovým servem